
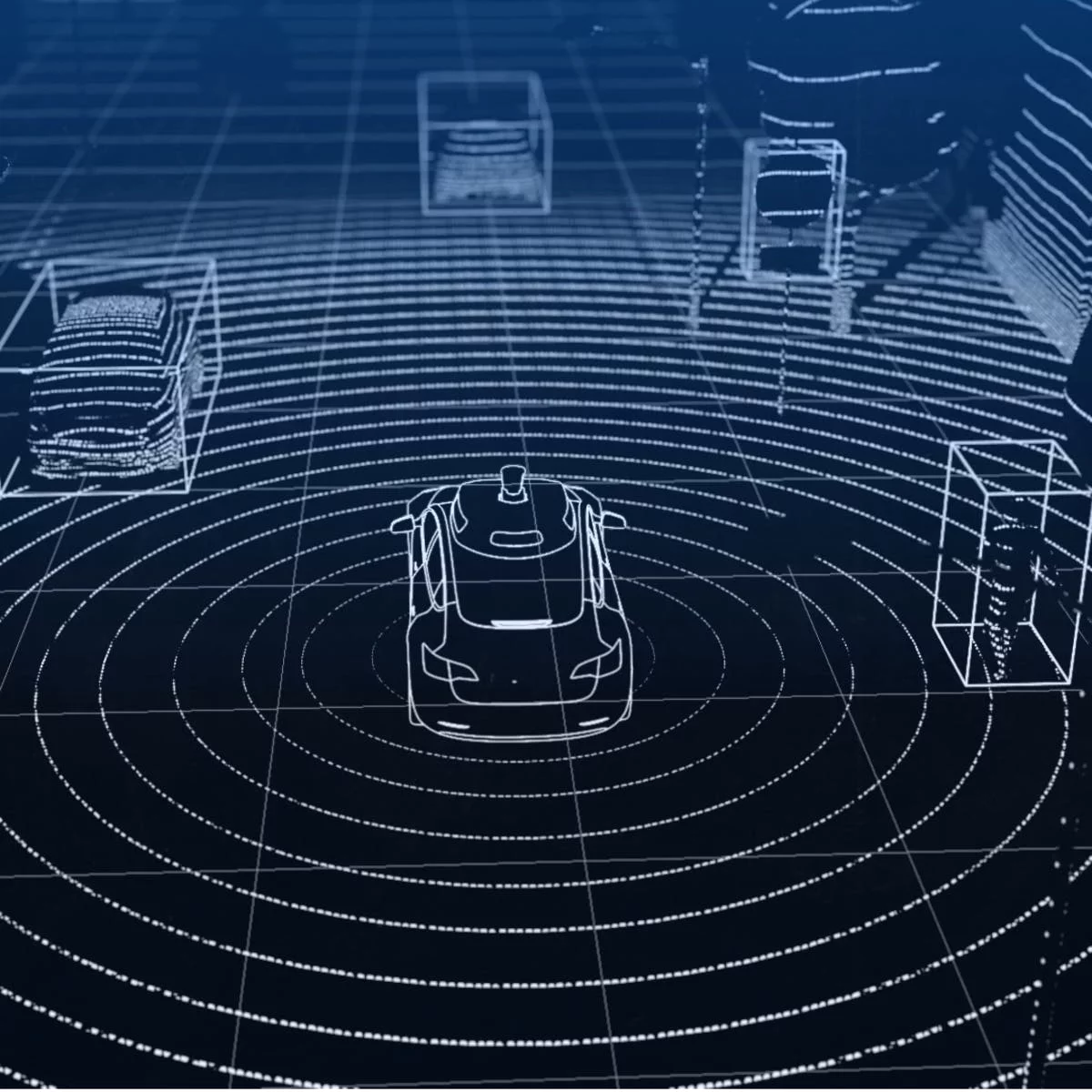
Welcome to Visual Perception for Self–Driving Cars, the third course in University of Toronto’s Self–Driving Cars Specialization. This course will introduce you to the main perception tasks in autonomous driving, static and dynamic object detection, and will survey common computer vision methods for robotic perception. By the end of this course, you will be able to work with the pinhole camera model, perform intrinsic and extrinsic camera calibration, detect, describe and match image features and design your own convolutional neural networks. You’ll apply these methods to visual odometry, object detection and tracking, and semantic segmentation for drivable surface estimation. These techniques represent the main building blocks of the perception system for self–driving cars. For the final project in this course, you will develop algorithms that identify bounding boxes for objects in the scene, and define the boundaries of the drivable surface. You’ll work with synthetic and real image data, and evaluate your performance on a realistic dataset. This is an advanced course, intended for learners with a background in computer vision and deep learning. To succeed in this course, you should have programming experience in Python 3.0, and familiarity with Linear Algebra (matrices, vectors, matrix multiplication, rank, Eigenvalues and vectors and inverses). …
Instructor Details
Courses : 3
Specification: Visual Perception for Self-Driving Cars
|
18 reviews for Visual Perception for Self-Driving Cars
Add a review
| Price | Free |
|---|---|
| Provider | |
| Duration | 20 hours |
| Year | 2019 |
| Level | Expert |
| Language | English |
| Certificate | Yes |
| Quizzes | No |

FREE


Levente K –
Good intro for those with not much experience w/ image processing/computer vision w.r.t. autonomous driving.
haozhen3 –
I do not understand why this course just have 4.3 ratting. Personally I think this course is very very helpful. It provides many practical advice and makes feel that I have got a up to date understanding of this fiels. There is no doubt that this is one of the best courses on Coursera.
Camilo A A B –
It is an amazing course. Really good information and projects related with Visual Perception
Miguel –
Excelent Course, extremely recommended.
Joachim S –
Like the previous two course I found this one well structured and presented. Basically my comments from course 1 and 2 still hold. I found the coding assignment for week 2 rather challenging but with the help of the discussion forum there should be no problem to pass it. In contrast the final coding project was less difficult. I really loved the content of the final assignment as it provided a detailed look under the hood of a perception stack guiding you through the various stages. The multiples pictures generated as part of your code are a great help to understand the various aspects.
River L –
I had a great time taking this course. Thank you!
Jon H –
While the lectures were fairly well done they in no way prepared you for the projects. Way too much time was spent deciphering exactly what was to be done in the project sections. Very disappointing was the complete lack of any support on the forum none zero. A little feedback and support here would haver made all the difference. Absolutely do NOT recommend this course and will not be taking the following on. Just not worth the time. I am better off learning on my own.
Aref A –
Content is great but lack of instructor support makes the course hard to understand.
Sruti B –
Useful
Chen L –
Some programming assignments need to be provided with more guidance and clarification.
Abdelrahman M –
need more example in lesson for programming tasks and for equations
Remon G –
Many thanks for this amazing course!!!! was very hard to me but I have learned a lot!!! Thanks!!!
Igor S –
Lots of errors in assignments. I had to read forums for almost every graded assignment, that’s disappointing.
PRASHANT K R –
superb, the assignment was quite tough but the overall experience was amazing. thanks to instructors, TAs, Coursera, and fellow learners!
Svetoslav V –
I know this is a tough topic, but I was expecting more in depth and practical coverage of the object detection and segmentation CNNs. Week 1&2 gave a good overview of visual perception and feature detection. Week 3 6 were pretty shallow. The final project was reasonably well put, but the outputs of the object detector and the segmentation CNNs were just given for use and to me personally those are the most interesting aspects of the autonomous vehicle vision system.
REVANTH B –
I am really surprised at the depth of topics discussed. I believe i spent around 5 8 hours researching topics on ANN and Machine learning.
Sen Y –
I feel disappointed. Programming assignments are neither for 2D object detection nor for semantic segmentation.
Eric H –
This course is excellent! It covers a broad range of basics of computer vision to in depth image detection and object collision estimation. I’d recommend this to anyone looking for a thorough introduction to visual perception for self driving cars.